了解传感器和雷达在自动驾驶中的作用
从自动驾驶的架构开始, 所有机器人都具有通过感知获取事件的处理架构. 类似于人的眼睛和耳朵. 通过摄像头获取周围障碍物和道路信息, 雷达, 地图, 等等, 从而计算出合理的应对方案.
根据我们对人类的分析, 我们在日常生活中的每时每刻都使用我们在眼睛中看到的信息来判断我们的下一个决定. 然而, 从眼睛到头到手到脚总是有时间延迟, 自动驾驶也是如此. 但与机器人相比, 我们的大脑自动 “预测” 事情将如何发展. 甚至在几毫秒内, 我们的决定是以对我们所见事物的预测为指导的, 这就是为什么我们可以比机器人更快地处理某些紧急情况. 所以, 我们将在自动驾驶决策之前添加一个预测模块.

感知过程也需要仔细推敲,可以分为两个阶段: “传感” 和 “洞察力”. “传感” 需要获取图片等原始数据, 声音, 等等, 尽管 “洞察力” 是从图片或声音中整理出来的有用信息. 的有用信息 “洞察力” 又可分为实时感知和记忆感知. 人类或机器人在处理信息时往往有不同的策略.
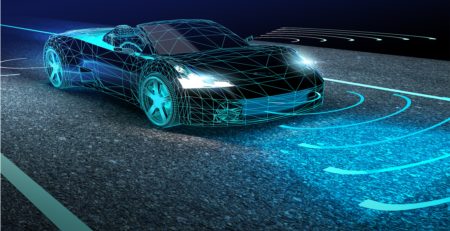
实时感知是传感器设备每时每刻获取的信息 (包含 照相机, 雷达, 全球定位系统, 等等)
记忆感知就是信息 (包括定位, 地图, 车辆连接信息, 等等) 由外部代理或过去的记忆收集和处理的.
此外, 各种传感器的算法和处理方式往往在信息上存在矛盾. 雷达看到你面前有障碍物,摄像头告诉你没有障碍物. 此时, 你需要添加一个 “融合” 模块. 对不一致的信息做进一步的关联判断.
为了保证系统对环境的理解和把握, 通常需要获取周围环境的大量信息, 包括障碍物的位置, 速度, 前方车道的精确形状, 标志的位置类型, ETC. 这些信息通常是通过融合来自激光雷达等各种传感器的数据获得的, 环视/注视相机 (相机), 和毫米波雷达.