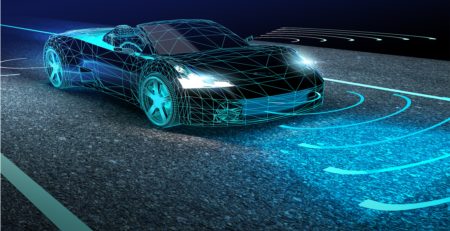
Як 4D mmWave радар допомагає розумнішим автомобілям
Наразі, оскільки великі світові автомобільні компанії вийшли на сферу електромобілів, це відображає рішучість різних країн світу замінити паливні транспортні засоби електромобілями.
Ця значна зміна напряму сприяє комплексному поєднанню електрифікації автомобіля та інтелекту. Система автономного водіння стала найважливішим полем битви для великих автомобільних компаній, і поява 4D радар стала великим проривом у галузі радіолокації.
Найбільш очевидною відмінністю між радаром міліметрового діапазону 4D-зображення та традиційним радаром міліметрового діапазону є те, що він покращує сприйняття інформації про висоту цілі, з наступним значним поліпшенням тонкощі сприйняття. Традиційні радари міліметрового діапазону в основному використовувалися для визначення відстані, відносна швидкість і азимут об'єктів через обмежені канали висоти та обмеження продуктивності процесора, що є значенням “3Д” в минулому. Проте, з точки зору альтиметрії, можливості традиційного радара дуже слабкі, і можна навіть сказати, що він взагалі не має можливості альтиметрії. Результатом цього є те, що коли на дорозі є статична перешкода, хоча радар може визначити точку відбиття перешкоди, часто важко зробити точне судження, оскільки він не може визначити висоту та розмір перешкоди. Інші включають неправильне сприйняття статичних цілей, таких як кришки дорожніх люків, лежачий поліцейський, вуличні знаки, та шляхопроводи, що призводить до загальної низької надійності радарів міліметрового діапазону в системах термоядерного синтезу.

Щоб зменшити непотрібне гальмування та покращити досвід користувача, деякі радіолокаційні компанії, Компанії з автономного водіння або автомобільні компанії вирішать напряму відфільтрувати такі статичні цілі, які сприймає радар під час фактичного процесу застосування. Можливо, у більшості сценаріїв, цієї стратегії достатньо, але для деяких незвичайних кутових випадків, здається трохи безсилим. Зокрема, багато систем автономного водіння рівня L2 використовують зір як основний датчик і радар міліметрового діапазону як допоміжний сприйняття. Якщо візуально виявлені перешкоди, це нормально. Якщо їх вчасно не знайдуть, їм доводиться покладатися на радар міліметрового діапазону, яка схильна до проблем.
У порівнянні з традиційним радаром міліметрового діапазону, 4Радар D може не тільки надавати інформацію про висоту цілі та досягати вищої кутової роздільної здатності завдяки більшій кількості каналів і вдосконаленим процесорам, але також виводить інформацію про щільну хмару точок, щоб окреслити навколишню територію. Контур об'єкта, це, зображення хмари точок.
З точки зору кутового дозволу, сучасний 4D радар міліметрового діапазону зазвичай може досягати горизонтальної кутової роздільної здатності в межах 1° і кутової роздільної здатності в межах 2°, що особливо важливо для підвищення безпеки водіння. Візьмемо як приклад ACC, згідно з відповідними джерелами, якщо ви хочете точно розрізнити два транспортні засоби 300 метрів, горизонтальна кутова роздільна здатність повинна бути менше 1°. І якщо ви хочете визначити світлофор, який висить навколо 6.5 метрів 150 метрів перед автомобілем, кутова роздільна здатність повинна досягати 2°, щоб задовольнити попит.
З точки зору виведення хмари точок, щільність традиційної радіолокаційної хмари точок дуже мізерна, і класифікувати перешкоди неможливо, у той час як 4D-радар має можливість виведення хмари точок, подібну до лідара, що може допомогти проаналізувати контур і категорію цілі, і підвищити надійність сприйняття всієї системи. В той самий час, це також може бути зайвим для сприйняття камери, як доповнення до класифікації, коли датчик зображення виходить з ладу. Завдяки значному вдосконаленню можливостей альтиметрії, кутова роздільна здатність, щільність хмари точок, тощо, 4Радар міліметрового діапазону D розглядається як важлива підтримка для еволюції автономного водіння від L2 до L3 або навіть вищого рівня L4/L5.